支线:4.UM982 RTK GPS ROS2 驱动部署文档
一、概述
本文档记录了在 Jetson Xavier NX 平台上,通过 Docker 容器(ROS 2 Humble)部署 Unicore UM982 双天线 RTK GPS 模块的 ROS2 驱动的完整过程,包括硬件连接、UM982 串口输出配置、驱动安装与调试、遇到的问题及解决方案。
UM982 配置完成后,驱动会发布以下 ROS2 话题:
/gps/fix(sensor_msgs/NavSatFix):经纬度、海拔、协方差/gps/utmpos(nav_msgs/Odometry):UTM 坐标、速度、航向四元数
该数据后续将接入 Nav2 GPS Waypoint Follower 实现室外自主导航。
二、硬件环境
| 项目 | 说明 |
|---|---|
| 开发板 | Jetson Xavier NX(JetPack,rootOnNVMe) |
| GPS 模块 | Unicore UM982 集成模块(内置 USB 转串口,免外接转换器) |
| 固件版本 | R4.10 Build13495 |
| 连接方式 | USB 线直连开发板,映射为 /dev/ttyUSB0 |
| 天线 | UM982 双天线(主天线 + 副天线,支持双天线测向) |
三、软件环境
| 项目 | 说明 |
|---|---|
| 宿主机系统 | Ubuntu 20.04(Jetson Xavier NX 原生) |
| Docker 容器 | ros2_humble_22,基于 Ubuntu 22.04,--runtime nvidia |
| ROS 2 版本 | Humble Hawksbill |
| Python 版本 | 3.10 |
| 驱动仓库 | ironoa/um982_ros2_driver |
3.1 目录映射关系
| 宿主机路径 | 容器内路径 |
|---|---|
/home/iot/ros2_ws/workspace/rtk_um982/ | /ros2_ws/workspace/rtk_um982/ |
3.2 Docker 容器说明
容器内运行原生 Ubuntu 22.04,可直接使用 apt install ros-humble-* 安装任意 ROS 2 官方包,无需从源码编译。GPU 通过 --runtime nvidia 挂载宿主机 CUDA 库,无需在容器内额外安装 CUDA 栈。
进入容器:
docker exec -it ros2_humble_22 bash四、UM982 串口输出配置(Windows UPrecise)
重要:UM982 默认不会输出驱动所需的 PVTSLN / GNHPR / BESTNAV 语句,必须先完成此配置步骤。配置通过
saveconfig写入 flash 后永久生效,只需配置一次。
4.1 确认 UM982 的 COM 口
UM982 有 COM1 / COM2 / COM3 三个逻辑串口。按下 UM982 的 RST 复位键后,在串口终端中观察输出的 $devicename 消息,即可确定当前 USB 连接的是哪个 COM 口:
$devicename,COM1*67上面的输出表示当前连接的是 COM1。

踩坑记录:最初参照驱动仓库 README 使用了
COM3,命令虽然返回 OK,但数据实际从 COM3 引脚输出,而 USB 连接的是 COM1,导致串口端什么数据都收不到。必须确认实际连接的 COM 口编号。
4.2 使用 UPrecise 配置
- 将 UM982 通过 USB 连接到 Windows 电脑
- 打开 UPrecise 软件(下载地址),连接对应串口
- 在命令窗口依次发送以下命令:
PVTSLNA COM1 0.05
GPHPR COM1 0.05
BESTNAVA COM1 0.05
saveconfig各命令说明:
| 命令 | 作用 | 频率 |
|---|---|---|
PVTSLNA COM1 0.05 | 输出 PVT 定位信息(经纬高、标准差) | 20Hz |
GPHPR COM1 0.05 | 输出航向 / 俯仰 / 横滚角及定位质量 | 20Hz |
BESTNAVA COM1 0.05 | 输出最佳导航解(速度、方向) | 20Hz |
saveconfig | 将当前配置写入非易失存储 | — |
注意:上述命令中的
COM1需替换为你实际确认的 COM 口编号。
4.3 验证配置成功
配置完成后,串口中应能看到三种消息交替输出:
#PVTSLNA,95,GPS,... ← PVT定位信息
$GNHPR,091003.05,... ← 航向/姿态信息
#BESTNAVA,84,GPS,... ← 最佳导航解
$GNGGA,091004.00,... ← 标准NMEA GGA(每秒1次)室内环境下,数据字段会全为零或显示 INSUFFICIENT_OBS,这是正常的——没有卫星信号。到室外有开阔天空的环境下,经纬度字段会被真实定位数据填充。

五、ROS2 驱动安装
5.1 克隆驱动仓库
在 Docker 容器内操作:
cd /ros2_ws/workspace/rtk_um982/src
git clone https://github.com/ironoa/um982_ros2_driver.git注意:该驱动原始基于 ROS 2 Jazzy 开发,但因为是纯 Python 包,在 Humble 下可直接编译使用,无需修改。
5.2 安装 Python 依赖
pip install pyproj pyserial如果提示需要
--break-system-packages,加上该参数即可。
5.3 代码修复:UTF-8 解码错误
UM982 在上电或复位时,可能通过串口发送包含非 UTF-8 字节的二进制数据,导致驱动的 readline().decode('utf-8') 抛出异常崩溃。
修改文件:um982_ros2_driver/um982.py 中的 read_frame 方法
修改前:
def read_frame(self):
frame = self.ser.readline().decode('utf-8')修改后:
def read_frame(self):
frame = self.ser.readline().decode('utf-8', errors='ignore')添加 errors='ignore' 参数后,遇到无法解码的字节会静默跳过,不会导致程序崩溃。
关于文件权限:如果在宿主机通过 VS Code Remote SSH 编辑该文件时遇到
EACCES: permission denied错误,是因为文件被 Docker 容器以 root 身份创建。在宿主机执行以下命令解决:bashsudo chmod -R 777 /home/iot/ros2_ws/workspace/rtk_um982/src/um982_ros2_driver/
5.4 编译驱动
cd /ros2_ws/workspace/rtk_um982
colcon build --packages-select um982_ros2_driver
source install/setup.bash六、运行与验证
6.1 启动驱动节点
cd /ros2_ws/workspace/rtk_um982
source install/setup.bash
ros2 launch um982_ros2_driver um982_ros2_driver.launch.py port:=/dev/ttyUSB0 baud:=1152006.2 启动参数说明
| 参数 | 默认值 | 说明 |
|---|---|---|
port | /dev/ttyUSB0 | UM982 对应的串口设备 |
baud | 921600 | 串口波特率(我们使用 115200) |
frame_id | gps | GPS 消息的 frame_id |
child_frame_id | base_link | 里程计消息的子坐标系 |
publish_rate | 20.0 | 发布频率(Hz) |
invert_heading | False | 是否反转航向角 |
6.3 查看话题数据
打开另一个终端进入容器:
docker exec -it ros2_humble_22 bash
ros2 topic list应能看到:
/gps/fix
/gps/utmpos
/parameter_events
/rosout
查看 GPS 定位数据:
ros2 topic echo /gps/fix室内测试输出示例(已获得粗略定位,但精度较低):
header:
frame_id: gps
status:
status: -1 # STATUS_NO_FIX,室内信号差
latitude: 39.12524936292
longitude: 117.01571874836
altitude: -0.6526
position_covariance:
- 103.0 # 纬度方差,较大表示精度低
- 0.0
- 0.0
- 0.0
- 16.9 # 经度方差
- 0.0
- 0.0
- 0.0
- 52.8 # 高程方差
position_covariance_type: 2 # DIAGONAL_KNOWN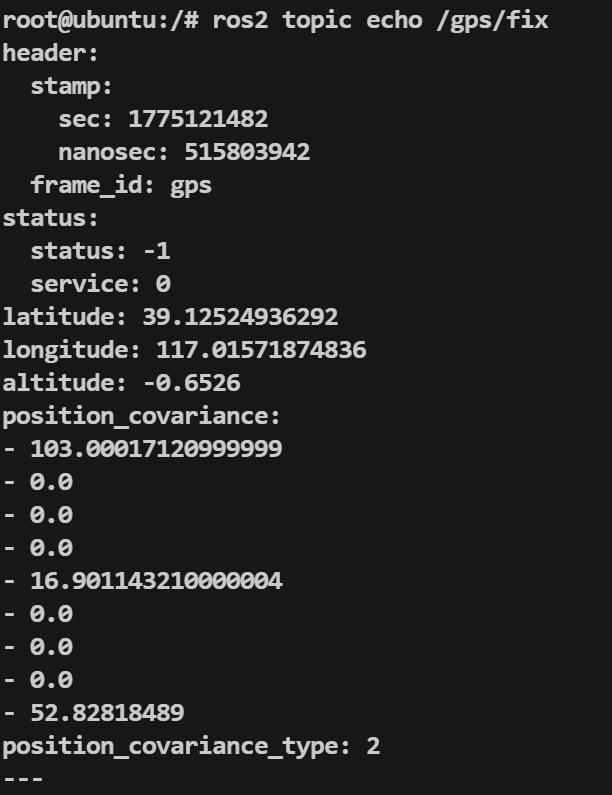
6.4 定位状态(status 字段)含义
| status 值 | 含义 | 对应 quality |
|---|---|---|
-1 | STATUS_NO_FIX — 无有效定位 | 0 |
0 | STATUS_FIX — 单点定位 | 1, 2, 5 等 |
1 | STATUS_SBAS_FIX — SBAS 增强 | 9 |
2 | STATUS_GBAS_FIX — RTK 固定解 | 4 |
七、踩坑记录
7.1 驱动仓库 404
最初尝试克隆的仓库 tyleralford/unicore-um982-ros2-driver 已不存在(返回 404)。替代方案为 ironoa/um982_ros2_driver。
验证方法:
curl -s -o /dev/null -w "%{http_code}" https://github.com/xxx/xxx7.2 Git clone 弹出认证提示
即使仓库是 public 的,如果系统配置了 Git credential helper 且缓存了错误的凭据,clone 时会弹出用户名密码提示并失败。解决方法:
GIT_TERMINAL_PROMPT=0 git clone https://github.com/ironoa/um982_ros2_driver.git如果仍然失败,说明仓库不存在或为 private。
7.3 COM 口配错导致无数据
UM982 有 COM1/COM2/COM3 三个逻辑串口。配置输出语句时指定的 COM 口必须与实际 USB 连接的 COM 口一致,否则命令虽然返回 OK,但数据会从另一个物理引脚输出,USB 端什么都收不到。
确认方法:按下 UM982 RST 键,观察串口输出的 $devicename,COMx 消息。
7.4 UTF-8 解码崩溃
UM982 上电时可能发送非 UTF-8 二进制数据,导致驱动 readline().decode('utf-8') 抛出异常。解决方案见第五节 5.3。
7.5 串口被占用
串口设备(/dev/ttyUSB0)同一时间只能被一个程序打开。如果之前用 picocom 或其他工具连接过串口且未正确退出,驱动启动时会报错。
排查方法:
ps aux | grep -E "picocom|minicom|ttyUSB"有残留进程则 kill 掉。picocom 的正确退出方式是 Ctrl+A 再按 X。
7.6 室内无法定位
室内环境下 UM982 无法接收到足够的卫星信号,PVTSLN 中的经纬度为全零,BESTNAV 显示 INSUFFICIENT_OBS。这是硬件物理限制,不是软件问题。需要到室外开阔环境测试。
冷启动首次定位通常需要 30 秒至 1 分钟。
7.7 文件权限问题
Docker 容器以 root 运行,创建的文件在宿主机上属于 root。通过 VS Code Remote SSH(以普通用户 iot 登录)编辑这些文件时会遇到权限拒绝。
解决方案:
sudo chmod -R 777 /home/iot/ros2_ws/workspace/rtk_um982/src/um982_ros2_driver/八、提示
已经将原仓库fork,并且根据上述修改说明进行修改,提交至仓库: ana52070/um982_ros2_humble_driver: Driver for UNICORECOMM UM882/UM980 GPS